지난 Open_Bot에서 있었던 데이터 수집 과정에서의 오류 때문에 또 한 번 Open Bot 프로젝트를 하게되었다.
1,2일차
OpenBot 어플을 깔려면 qr코드를 통해 설치해야한다.


지난번과는 부품이 살짝 다르다. 사용자가 폰을 더 편하게 볼 수 있도록 부품이 수정되었다.
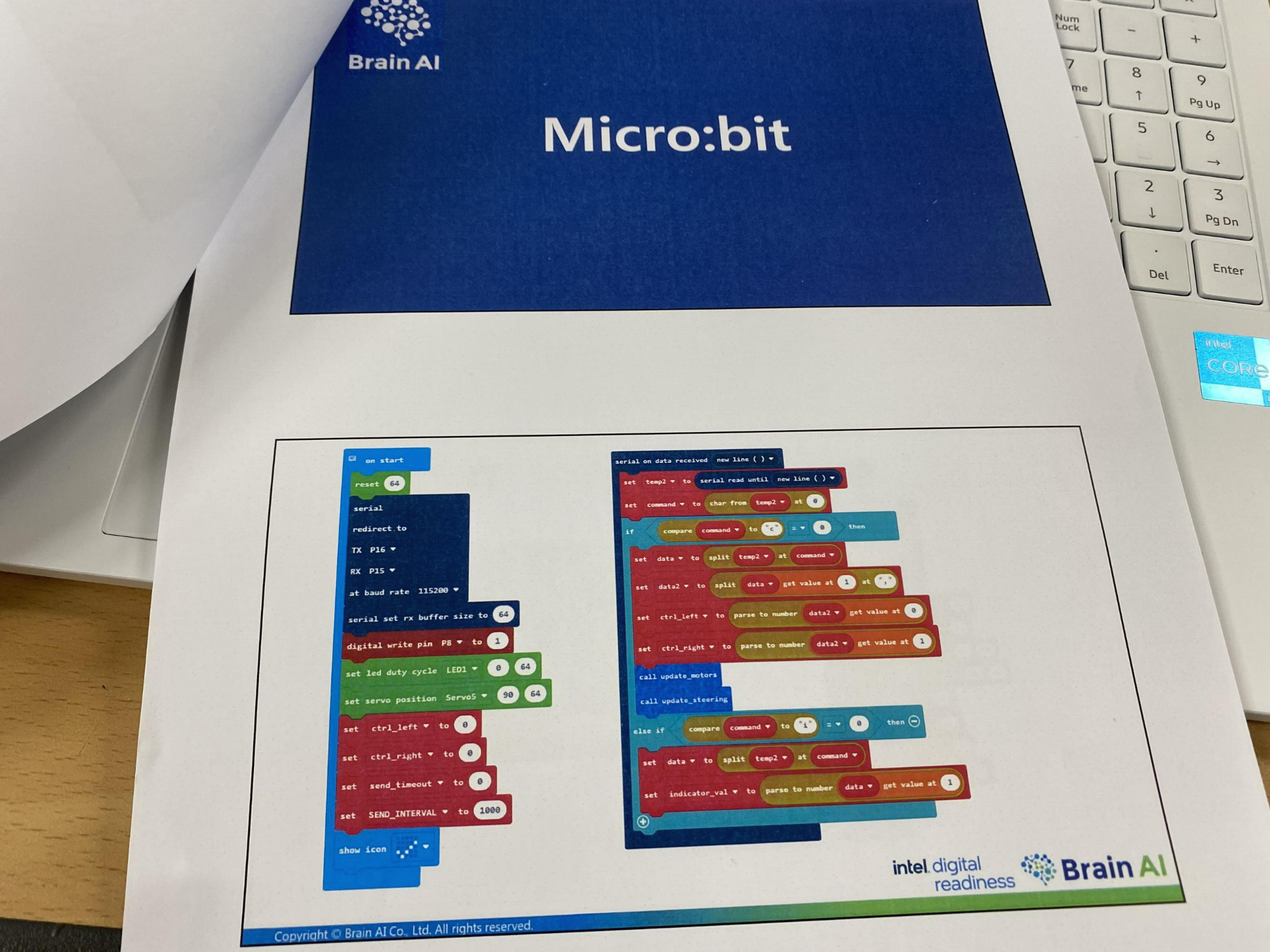
마이크로빗으로 움직임을 구현해봤다. 마이크로빗으로 코딩하면서 Open Bot의 움직임에 대해 더 자세히 배울 수 있었다.

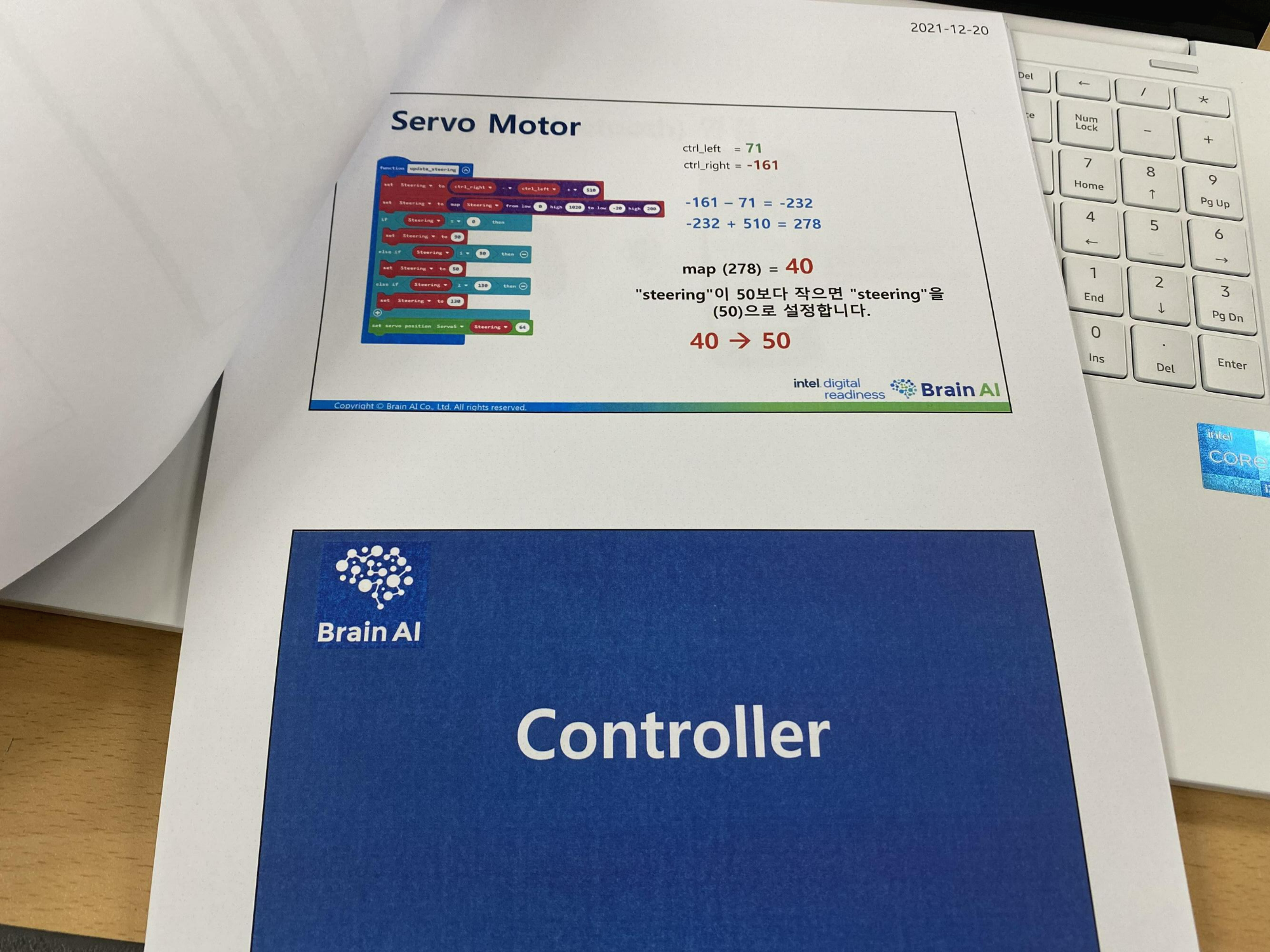
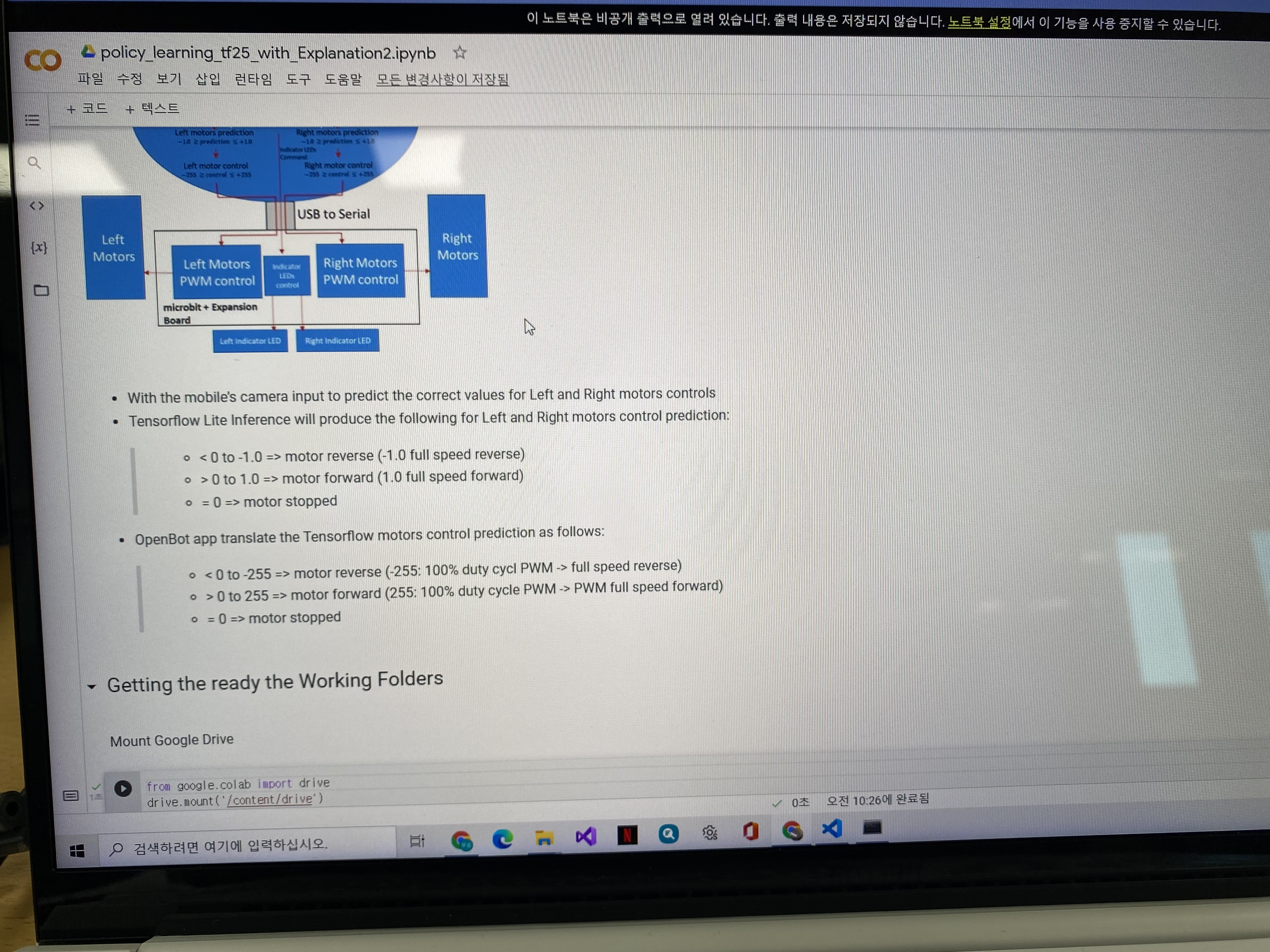
DC모터와 서보모터가 Open Bot의 방향을 결정하고 속도를 결정한다. 방향과 속도를 결정짓는 공식을 배우고 공식을 이용하여 속도를 맞추는 문제도 풀어봤다. 문제까지 다 풀어보니까 공식에 대한 더 자세한 이해를 할 수 있었다.
마이크로빗 코딩과 부품 조립을 끝마치고 사람을 인식하면 따라오도록 설정해서 주행한 결과 매우 만족스럽게 잘 따라온다.
3일차

사람을 따라가는 것을 성공했다면 그 다음은 도로를 따라 자율주행하는 것이다. 자율주행을 하기 위해서는 데이터를 수집해야하는데 컨트롤러로 조종하면서 데이터를 수집할 수 있다.
도로를 따라 주행하면서 데이터를 수집한다.
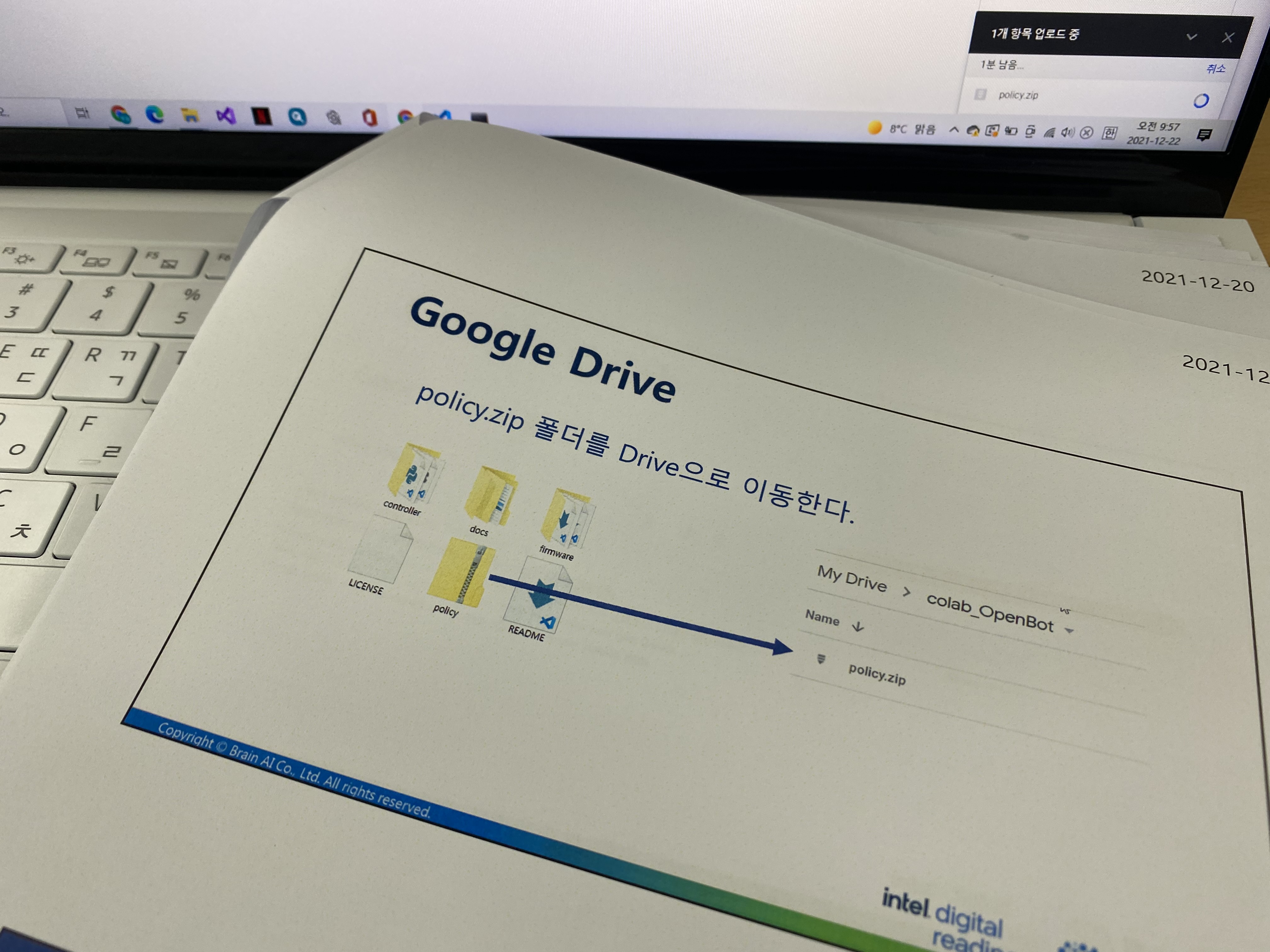

수집한 데이터를 압축하고 구글 드라이브에 넣어준다. 그 다음 google colab에서 해당 파일을 압축 푼 뒤 실행시면 된다.
데이터를 train_data폴더와 test_data폴더에 각각 80퍼센트, 20퍼센트의 양을 넣어준다.
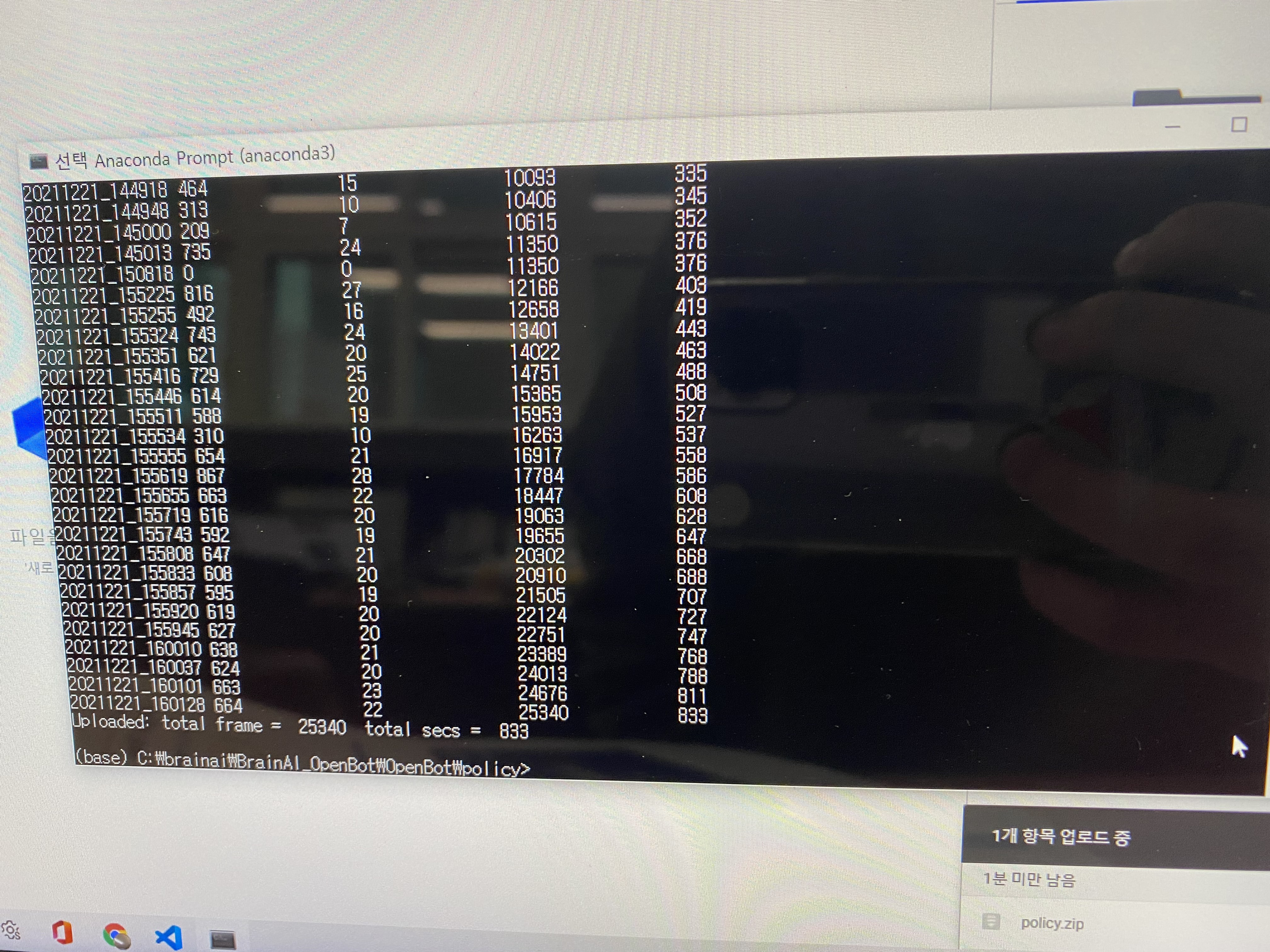
압축을 풀고 수집한 데이터의 프레임 수를 확인해본다. 폴더가 비었거나 일정 데이터를 수집하지 못했다면 삭제해준다.

데이터를 확인하고 colab에서 파일을 실행시켜준다.
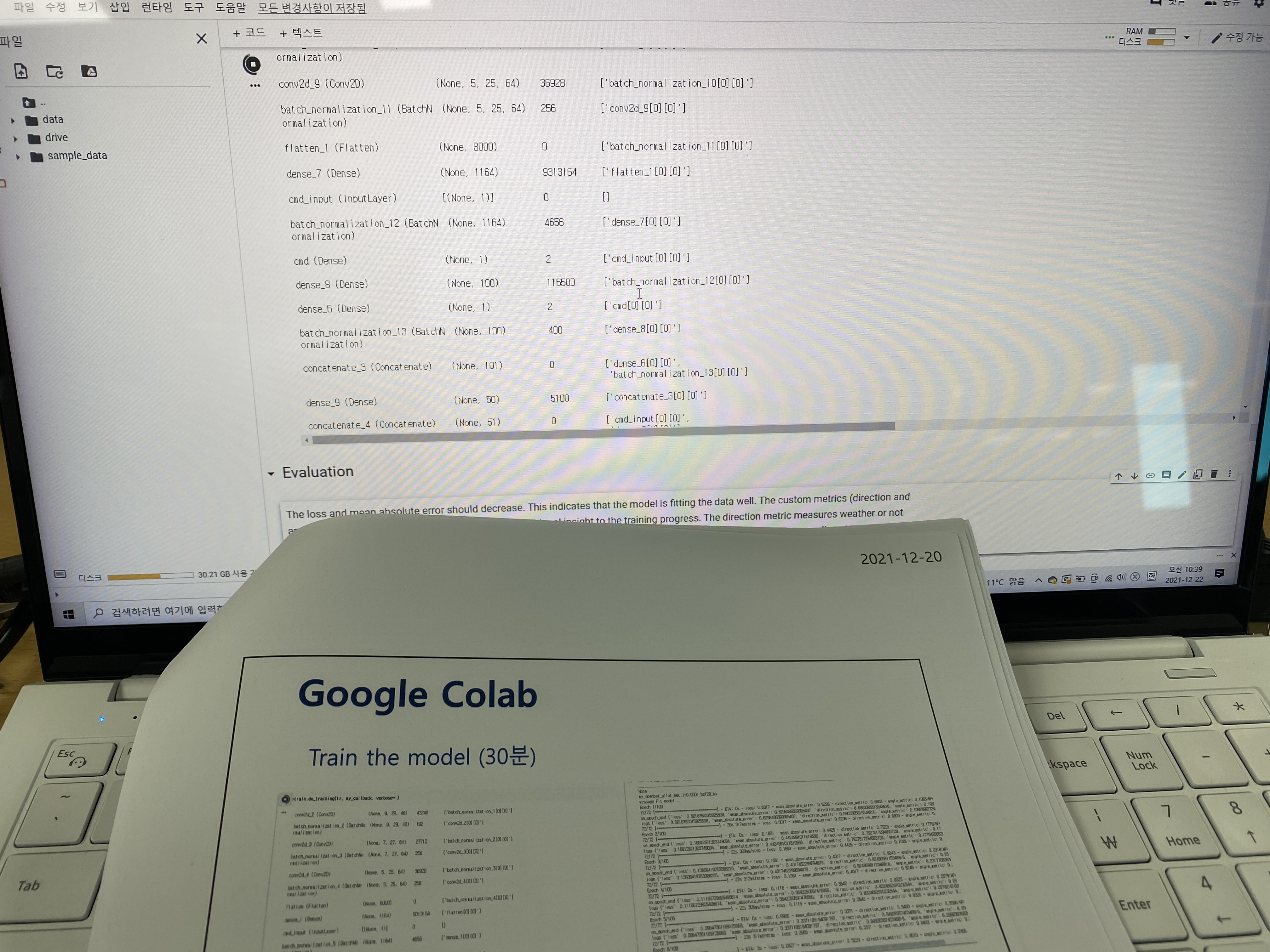
수집한 데이터를 학습 시키는 과정이다. 데이터가 풍부할 수록 더욱 정교한 움직임을 구현할 수 있을 것이다.
첫 자율주행은 데이터 수집 과정에서 오류인지 주행이 되지 않았다.
위 과정을 여러번 반복 시킨 후 계속 데이터를 축적시켜서 학습시켰다. 많은 양의 데이터인 만큼 자율주행 능력은 상당하다.
배운것
처음 OpenBot을 했을 때는 속도나 방향이 어떻게 바뀌게 되는지 잘 이해하지 못했지만 프로젝트를 두 번째 했을 때는 속도나 방향이 어떻게 바뀌고 데이터 수집과정이 왜 중요한지 더 깊이 이해할 수 있었다. 2일차 마지막에 OpenBot을 개발한 Muller와 줌으로 질문을 주고 받으며 OpenBot에 대한 궁금증을 풀 수 있었다.
'인공지능' 카테고리의 다른 글
| AI KOREA (0) | 2022.11.28 |
|---|---|
| Intel AI4Youth 인공지능 국제교류 (싱가포르) - Intel_Openbot 만들기 (0) | 2021.11.04 |
| 인공지능 학습용 키트 소개 (다중 분류기) (1) | 2021.10.20 |
| Intel AI4youth 인공지능 팀 프로젝트 - AI CCTV (1) | 2021.10.20 |




댓글